2011 Roboter Franconian RoboForce Soccer A Primary
Die Roboter der Gruppe Franconian Roboforce
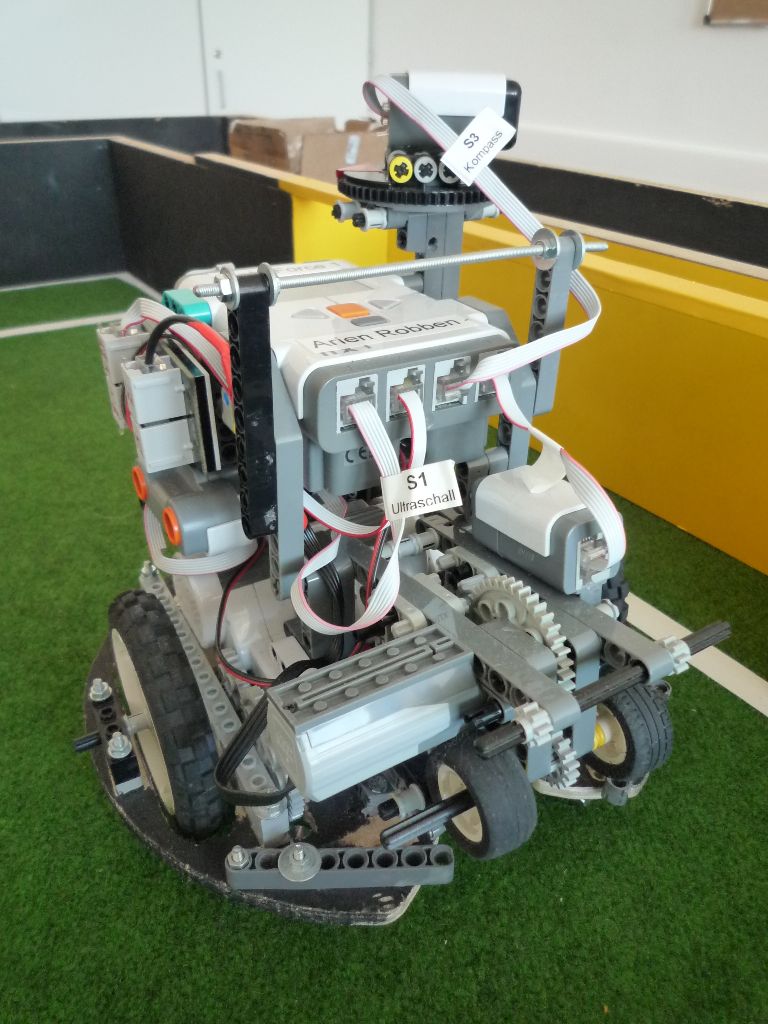
Die Roboter bestehen immer noch zum größten Teil aus Legotechnik Bauteilen, welche den NXT halten. Weiterhin haben unsere Roboter wenige Sensoren. Leider hatten wir anfangs Probleme mit der Ballerkenung wegen den neuen Bällen und den schlechten Lichtverhältnissen, dass besserte sich aber nachdem wir die neuen Infrarotensoren für die speziellen Bälle angebaut hatten.Die neuen Regeln und eine tiefere Gewichtsgrenze haben dazu geführt, dass unsere Roboter mit weniger Senoren auskommen müssen.
In den Robotern sind folgende Sensoren eingebaut:
- Hitechnic Kompass-Sensor (USA) drehbar
- CBall Ballsensor (Quantum torque Australien)
- 2x NXT Motor
- 2x Powerfunctions-Motor small für Dribbler
- Touch-Sensor, damit der Roboter weiß, ob er den Ball hat oder nicht
- Ultraschallsensor (Lego)
- Multiplexer für I²C-Sensoren